MR087M Тренажер по управлению движением Дидактическое оборудование Инструмент для обучения датчиков
Обзор:
Это устройство может реализовать обнаружение датчика, обработку транзакций, интеллектуальное управление и выполнение привода производственной линии. Это относится к базовым специализированным знаниям и базовым требованиям к электромеханическим навыкам в механической технике, микроэлектронной технике, электрических и электронных технологиях, технологиях обнаружения датчиков, интерфейсных технологиях, технологиях преобразования информации, сетевых коммуникационных технологиях и других основных направлениях мехатроники.

Характеристика функции:
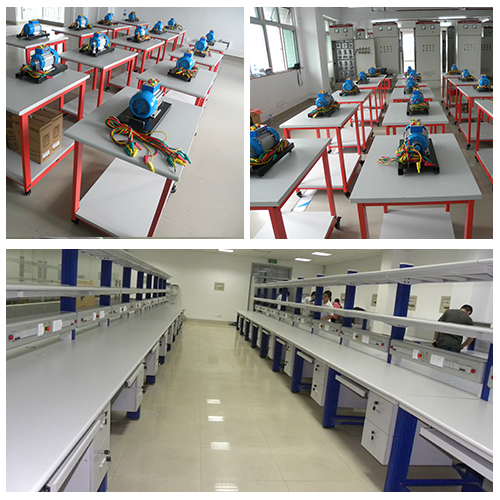
1.Эта система адаптирует промышленную структуру алюминиевого профиля, учебный рабочий стол с алюминиевым рельсом оснащен тремя основными блоками: движение небольшого автомобиля вперед и назад (отдача), манипулятор с тремя степенями свободы (переноска), обнаружение датчика (идентификация материала, определение расстояния, подсчет и т. д.), он может использоваться для одного привода, а также может составлять платформу для типичной автоматической производственной линии.
2. Системный механизм адаптирует привод цилиндра, драйвер двигателя с регулируемой скоростью преобразования частоты, драйвер двигателя постоянного тока. Интерфейс управления ПЛК и преобразователем полностью открыт, он может произвольно управлять внешним подключением, он может адаптировать структуру комбинированного типа модуля, каждый рабочий блок является относительно независимым модулем, он адаптирует стандартную структуру и модуль типа выдвижного ящика, он имеет более сильную взаимозаменяемость.
3. Схема аппаратной защиты механизма манипулятора. Он может выполнять оценку сигнала положения манипулятора и выходного сигнала ПЛК, управляющий сигнал, соответствующий логической функции, является управляющим сигналом реакции манипулятора, в противном случае он не сработает, таким образом, он реализует защиту координат механизма.
4. Он оснащен различными промышленными датчиками, способствующими сбору данных о сигналах оборудования, удобен для студенческой программы и надежен в работе всего механизма. Это может помочь студенту освоить принцип работы различных датчиков и практическое применение, использовать разные датчики для реализации разных или одинаковых функций.
5. В соответствии с конфигурационным программным обеспечением WINCC верхнего компьютера для выполнения сетевых коммуникаций, оно может поддерживать 485, MODBUS, сеть DP и Ethernet для обмена данными.

Технические характеристики:
1. Габаритные размеры: 1240 (L) × 720 (W) × 1300 (H) мм (ящик не растягивается)
2.Макс. Скорость сортировки: 20 раз / мин.
3. Время непрерывной автоматической сортировки: 24 часа, время непрерывной сортировки: 28800 раз / день
4.Расчетный рабочий источник питания: переменный ток, 220 В, 50 Гц. Основная рабочая мощность, 1,2 кВт.
5.Номинальное рабочее давление воздуха: 0,3-0,4 МПа
6. Рабочая среда: температура-10 ℃ ~ 35 ℃, относительная влажность ≤85% (25 ℃)

Поддерживаемый обучающий контент эксперимента:
1. Монтаж и пуск пневмосистемы.
(1) Установка цепи управления пневматическим направлением
(2) Установка пневматической цепи управления скоростью
(3) Установка пневматической цепи управления последовательностью
(4) Установка пневматического манипулятора
(5) Подключение газового контура пневмосистемы
(6) Магнитный переключатель регулировки положения
(7) Пневматическая система.
(8) Установка схемы управления поворотом
2. Установка и пуск преобразователя.
(1) Подключение преобразователя и главной цепи двигателя переменного тока
(2) Настройка параметров и работа панели преобразователя
(3) Регулирование скорости электродвигателя переменного тока, управляющего панелью преобразователя.
(4) Управляйте двигателем, запускайте и останавливайте его в соответствии с внешним контактом датчика.
3. Монтаж и пуско-наладка электромеханического оборудования.
(1) Регулировка соосности передающего устройства
(2) Установка и регулировка ленточного конвейера
(3) Установка и ввод в эксплуатацию переносного манипулятора
(4) Установка и ввод в эксплуатацию оборудования для сортировки товаров.
(5) Монтаж и ввод в эксплуатацию кормового оборудования
(6) Установка и ввод в эксплуатацию автоматической линии защиты.

4. Установка электрической схемы управления и программирование ПЛК.
(1) Подключение и запись программы цепи управления положительным и отрицательным движением двигателя.
(2) Подключение и запись программы схемы управления скоростью двигателя.
(3) Программа обнаружения записи ремня
(4) Программирование пневматического управления последовательным действием
(5) Программирование управления пневматическим манипулятором
(6) Программирование управления оборудованием мехатроники
(7) Программирование автоматического управления линией защиты